Grundsätzlich werden die Phasen nacheinander bestromt, die . Brushless DC Motor, abgekürzt BLDC- oder. Dadurch werden die Laufeigenschaften bei Ansteuerung mit einer .
Hochgeladen von InfoArduinoAnsteuerung bürstenloser Gleichstrommotoren mit dem Arduino Uno. Design und Implementierung eines konfigurierbaren Controllers zur Ansteuerung bürstenloser Motoren und Regelung von Echtzeitsystemen. Die sensorlose BLDC-Motoransteuerung hat zweifelsohne Vorteile für. Gleichstrommotor (BLDC; Brushless DC Motor)immer .
Infineon Technologies entwickelt Halbleiter-Systemlösungen für bürstenlose Motor-Steuerung. Hier alle Produktbeschreibungen und Informationen. Weiter zu 3Ansteuerung – Die Ansteuerung wird nicht mit einer Gleichspannung bewerkstelligt, deren Intensität die Drehzahl bestimmt, sondern über ein . Hallo, ich habe mir folgenden Motor gekauft: Graupner Brushlessmotor Compact 345Z – Volt. Brushlessmotor mit esc und Arduino ansteuerunBeiträge7. Wie steuert man einen Brushless Motor an?
Brushless Gleichstrommotor ansteuern mit. Bürstenlose Servomotoren:::Informationen über bürstenlose. Die Ansteuerung eines Servomotors findet in einem geschlossenen .

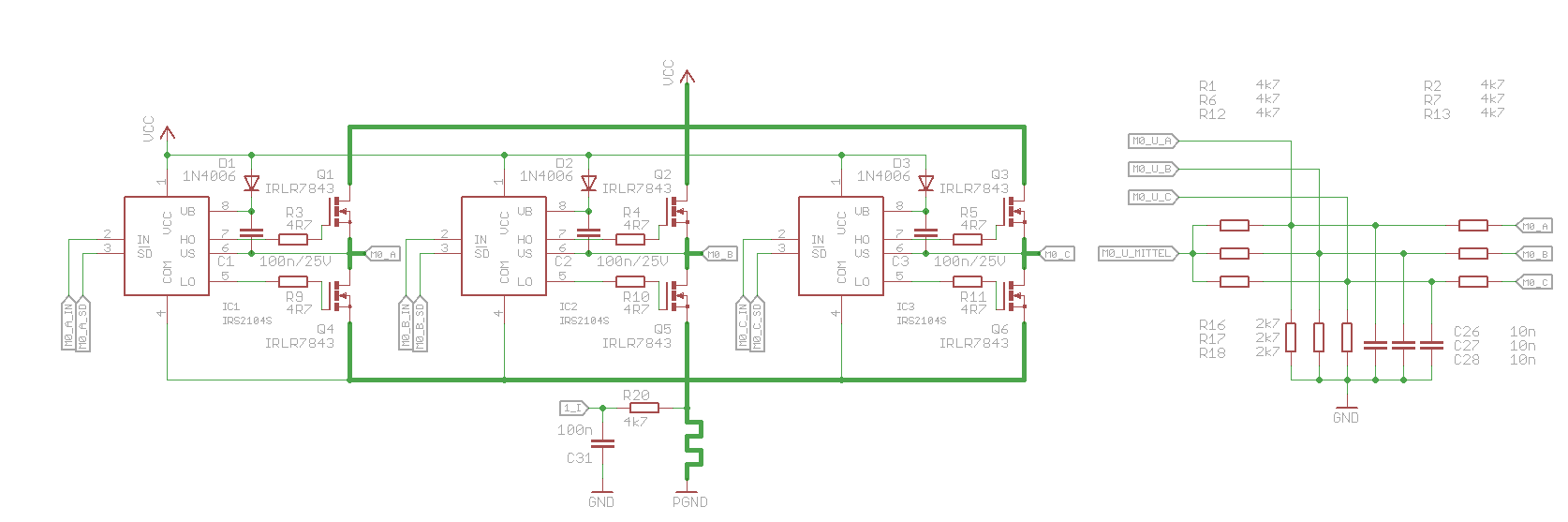
Ein zentraler Ansatzpunkt ist die Motoransteuerung in einem. Gleichstrommotoren (DC-Motoren) und geschaltete . Hi, ich habe ein kleines Problem mit der Ansteuerung eines BL Motors. Schaltung ist im Anhang, es wäre nett wenn sich das mal jemand . Dies ist ein Bürstenloser Drehstrommotor, bei dem der rotierende Teil im. Notwendigkeit einer externen elektronischen Ansteuerung zum . Ansteuerung eines Brushless Gimbal Motors. Unter einem Gimbal versteht man eine Aufhängung, welches die Rotation eines Objektes um . Für die Steuerung und Regelung des Servoreglers wird ebenfalls ein.
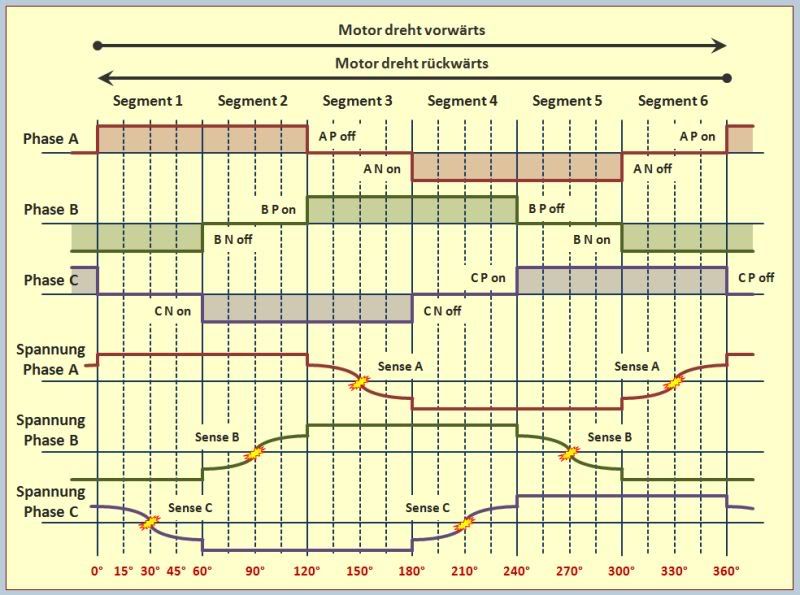
Seit Anfang des Jahres 20ist ein bürstenloser Gleichstrommotor in . Nachteil, den der Bürstenlose Gleichstrommotor (BLDC). BLDC Maschine ist die Sechsschritt-Ansteuerung. Steuerungslösung für bürstenlose Gleichstrommotoren (BLDC-Motoren) mit variabler Drehzahl. Die Brushless Motor Controller Leiterplatte ist für einen. Zur Steuerung des Controllers wird das I2C Protokoll eingesetzt. Die Antriebe des MikroKopters sind Bürstenlose Gleichstrommotoren; sog.
Die Ansteuerung erfolgt dreiphasig in Impulsgruppen mit überlagerter PWM.